publications
scroll down for papers, patents, and theses
2026



2023
-
 Reinforcement Learning for Legged Robots: Motion Imitation from Model-Based Optimal ControlIn Arxiv , Dec 2023
Reinforcement Learning for Legged Robots: Motion Imitation from Model-Based Optimal ControlIn Arxiv , Dec 2023 -
 ViTAL: Vision-Based Terrain-Aware Locomotion for Legged RobotsIn IEEE Trans. Robot. (T-RO) , Apr 2023
ViTAL: Vision-Based Terrain-Aware Locomotion for Legged RobotsIn IEEE Trans. Robot. (T-RO) , Apr 2023


2022
2021
- On State Estimation for Legged Locomotion over Soft TerrainIEEE Sensors Letters (L-SENS), Jan 2021
2020
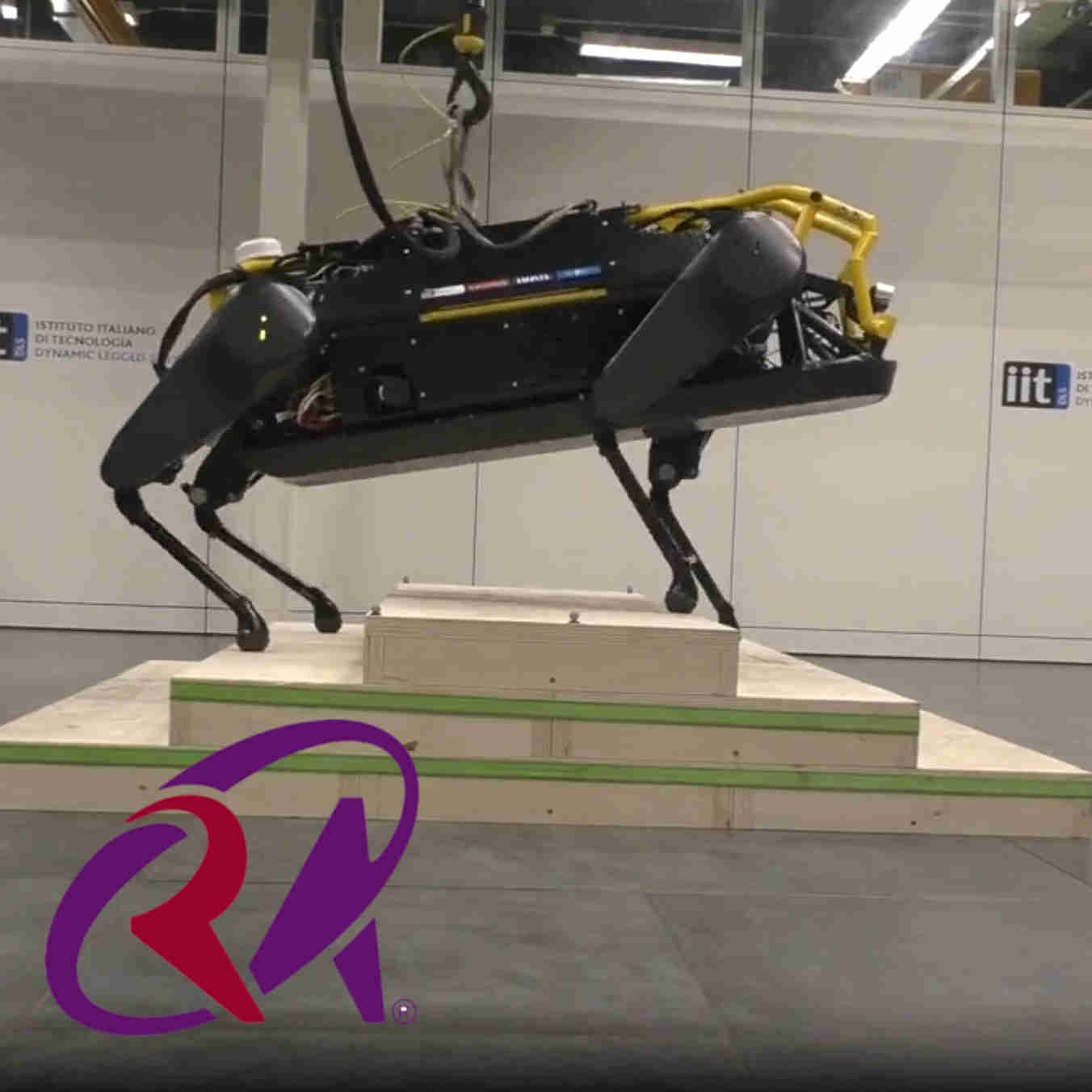
- On the Influence of Body Velocity in Foothold Adaptation for Dynamic Legged Locomotion via CNNsIn International Conference on Climbing and Walking Robots (CLAWAR) , Aug 2020
-
 STANCE: Locomotion Adaptation Over Soft TerrainIEEE Transactions on Robotics (T-RO), Apr 2020
STANCE: Locomotion Adaptation Over Soft TerrainIEEE Transactions on Robotics (T-RO), Apr 2020

2019
- Brief introduction to the quadruped robot HyQRealIn Italian Conference on Robotics and Intelligent Machines (I-RIM) , Oct 2019
-
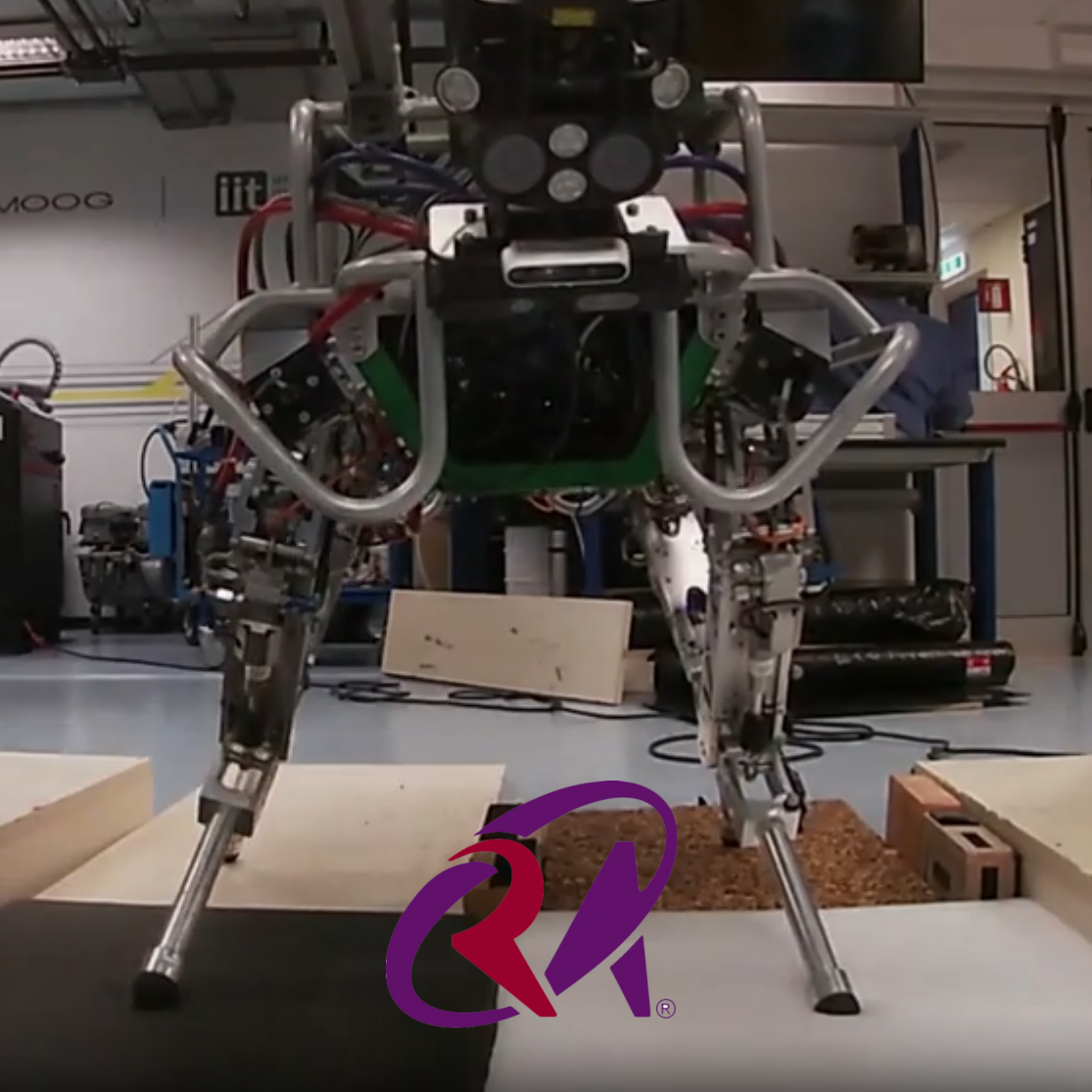
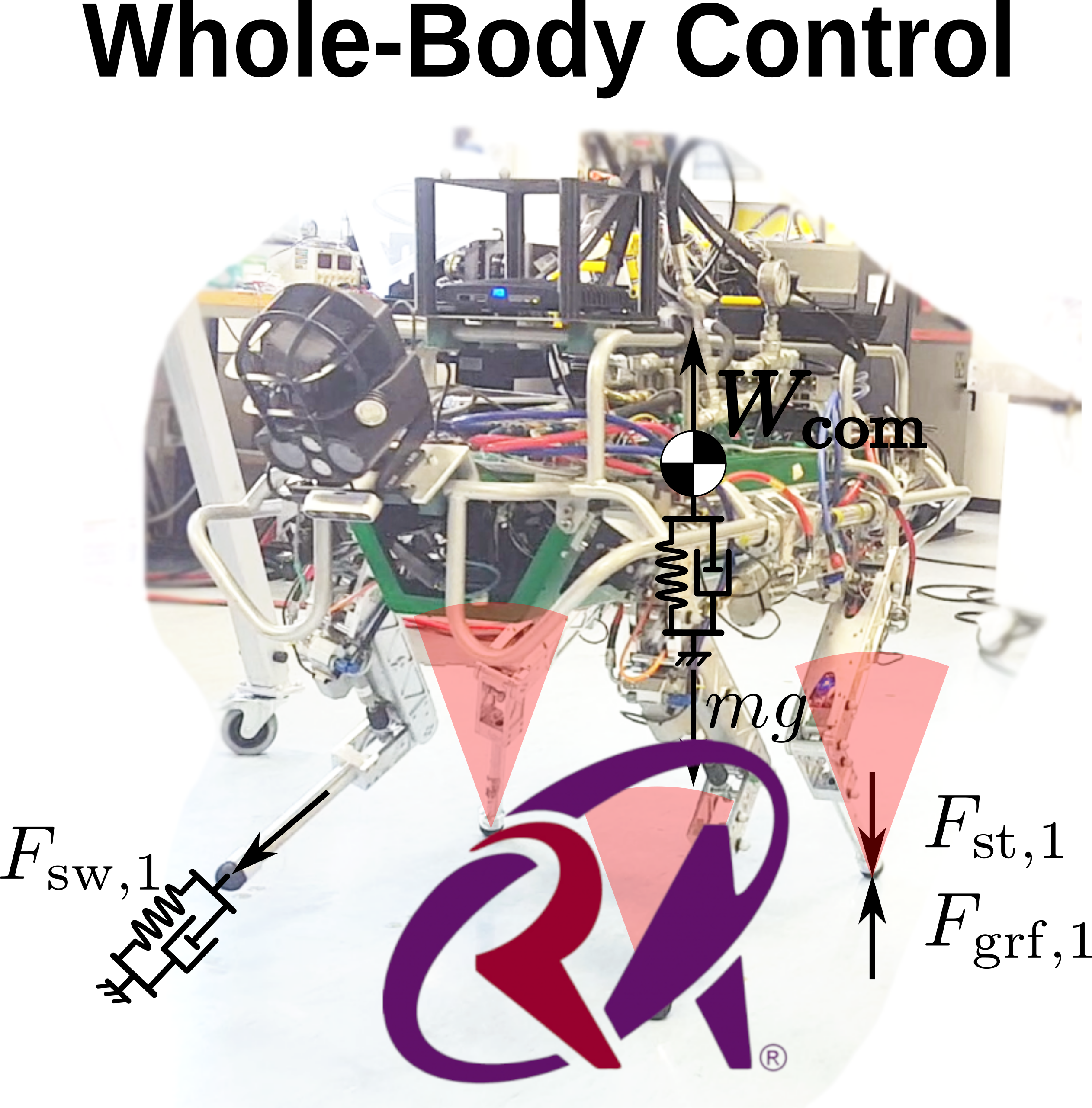 Passive Whole-Body Control for Quadruped Robots: Experimental Validation Over Challenging TerrainIEEE Robotics and Automation Letters (RA-L), Jul 2019
Passive Whole-Body Control for Quadruped Robots: Experimental Validation Over Challenging TerrainIEEE Robotics and Automation Letters (RA-L), Jul 2019

2018
- Inertial Properties in Haptic Devices: Non-Linear Inertia Shaping vs. Force FeedforwardIn IFAC Symposium on Robot Control (SYROCO) , Aug 2018
- Respiratory Motion Estimation of the Liver with Abdominal Motion as a SurrogateThe International Journal of Medical Robotics and Computer Assisted Surgery (IJMRCAS), Jun 2018
patents
2026
- U.S. Patent 63/977290Feb 2026
- U.S. Patent 63/977296Feb 2026
theses
2021
- On Terrain-Aware Locomotion for Legged RobotsIstituto Italiano di Tecnologia , Apr 2021Ph.D. Thesis
2017
- Respiratory motion estimation of the liver with abdominal motion as a surrogate: a supervised learning approach.University of Twente , Aug 2017M.Sc. Thesis
2014
- Model Predictive Control for Multi-objective Cooperative Adaptive Cruise Control System.RWTH Aachen University , Aug 2014B.Sc. Thesis