Shamel Fahmi
Robotics, Artificial Intelligence, Reinforcement Learning, Machine Learning

I am a Research Scientist and Technical Lead in Reinforcement Learning at the Robotics and AI (RAI) Institute, formerly known as the Boston Dynamics AI Institute (BDAI). My research focuses on robot locomotion and learning-based control for a wide range of platforms, including quadrupeds, bipeds, humanoids, wheeled robots, and others.
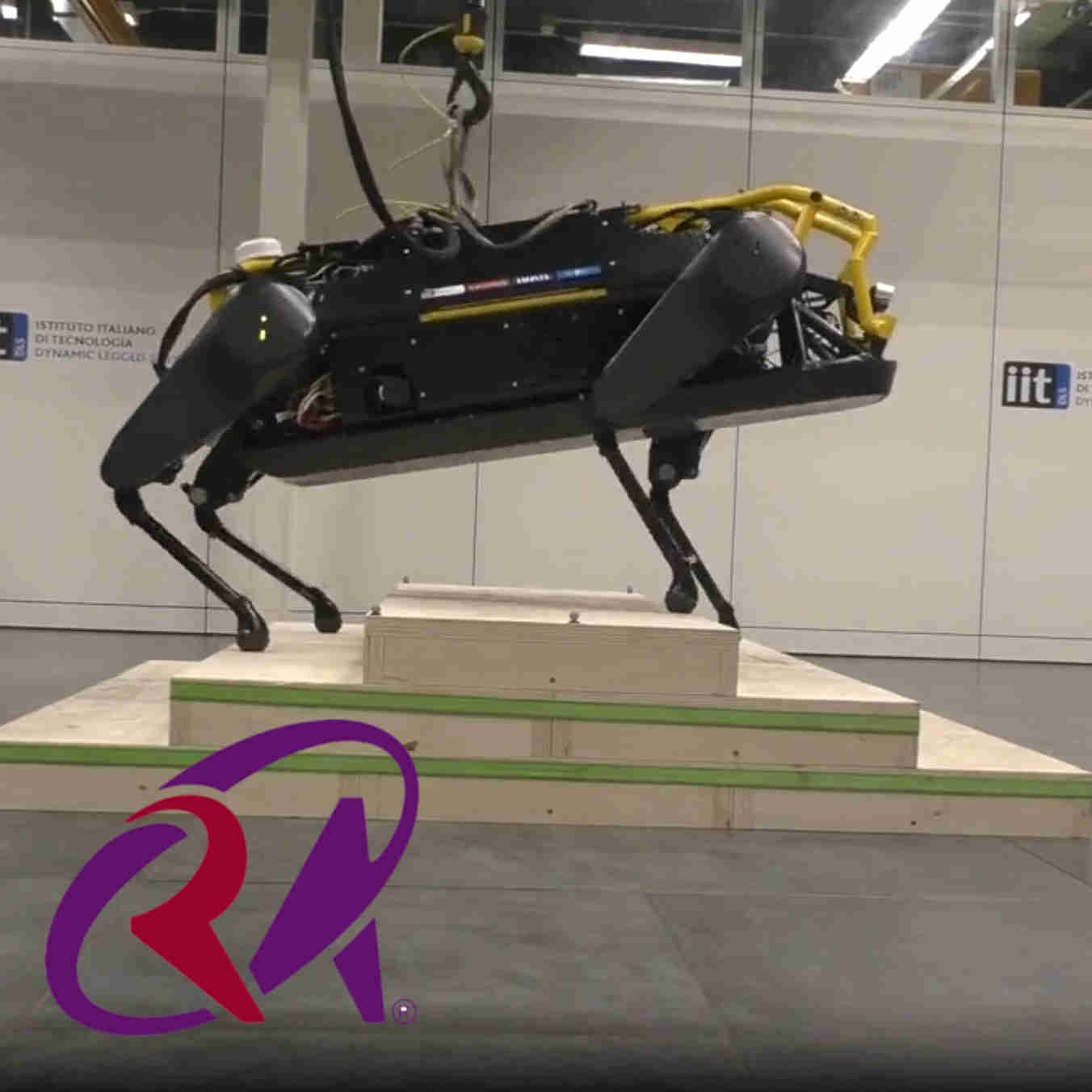
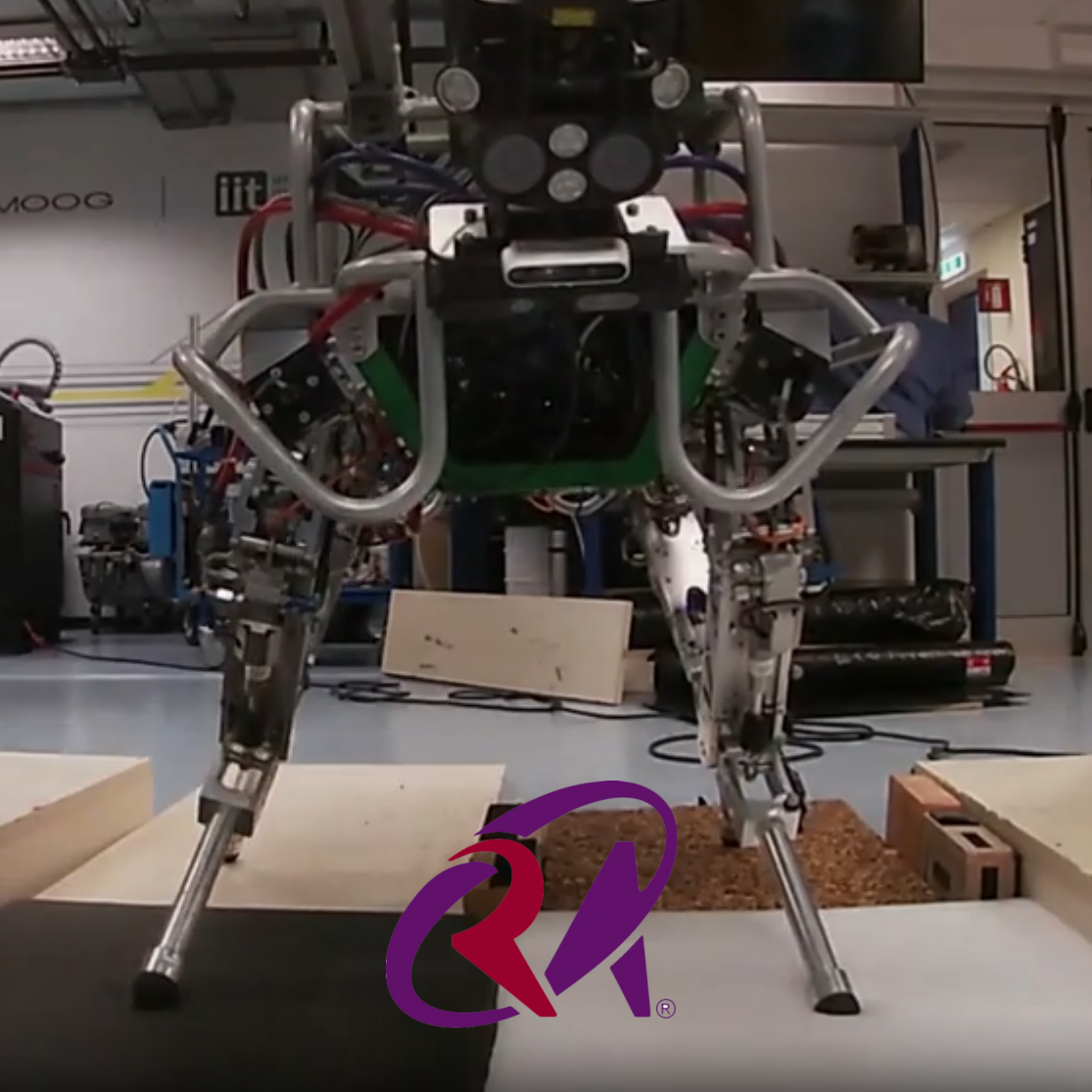
At RAI, I am part of the UMV team where I develop RL behaviors for the UMV robots. Before RAI, I was at MIT, where I worked with Prof. Sangbae Kim on reinforcement learning and whole-body control for the Mini Cheetah and the MIT Humanoid. Prior to that, I was a researcher at the Italian Institute of Technology (IIT), where I worked on both optimization-based and learning-based locomotion controllers for the HyQ and HyQReal quadrupedal robots, as well as perception and state estimation.
Over the years, I have also worked at the German Aerospace Center (DLR), the University of Twente, and RWTH Aachen University on a variety of robotics and controls projects.
I have more than 10 years of experience in robotics and over 5 years of experience in Physical AI and reinforcement learning. My work sits at the intersection of robot learning, locomotion, control, and perception, with the goal of building agile, robust, and intelligent robots that can operate in the real world.
Outside of research, I enjoy racing triathlons and painting.
news
| Jun 19, 2026 | Hellow World! (Again) – Welcome to my new website. I’ve been offline for 5 years now busy with research. I intend to be updating this website now with some recent updates. Big thanks to Dongho Kang who I stole this template from. |
|---|
selected publications
-
 Reinforcement Learning for Legged Robots: Motion Imitation from Model-Based Optimal ControlIn Arxiv , Dec 2023
Reinforcement Learning for Legged Robots: Motion Imitation from Model-Based Optimal ControlIn Arxiv , Dec 2023 -
 ViTAL: Vision-Based Terrain-Aware Locomotion for Legged RobotsIn IEEE Trans. Robot. (T-RO) , Apr 2023
ViTAL: Vision-Based Terrain-Aware Locomotion for Legged RobotsIn IEEE Trans. Robot. (T-RO) , Apr 2023 -
 STANCE: Locomotion Adaptation Over Soft TerrainIEEE Transactions on Robotics (T-RO), Apr 2020
STANCE: Locomotion Adaptation Over Soft TerrainIEEE Transactions on Robotics (T-RO), Apr 2020 -
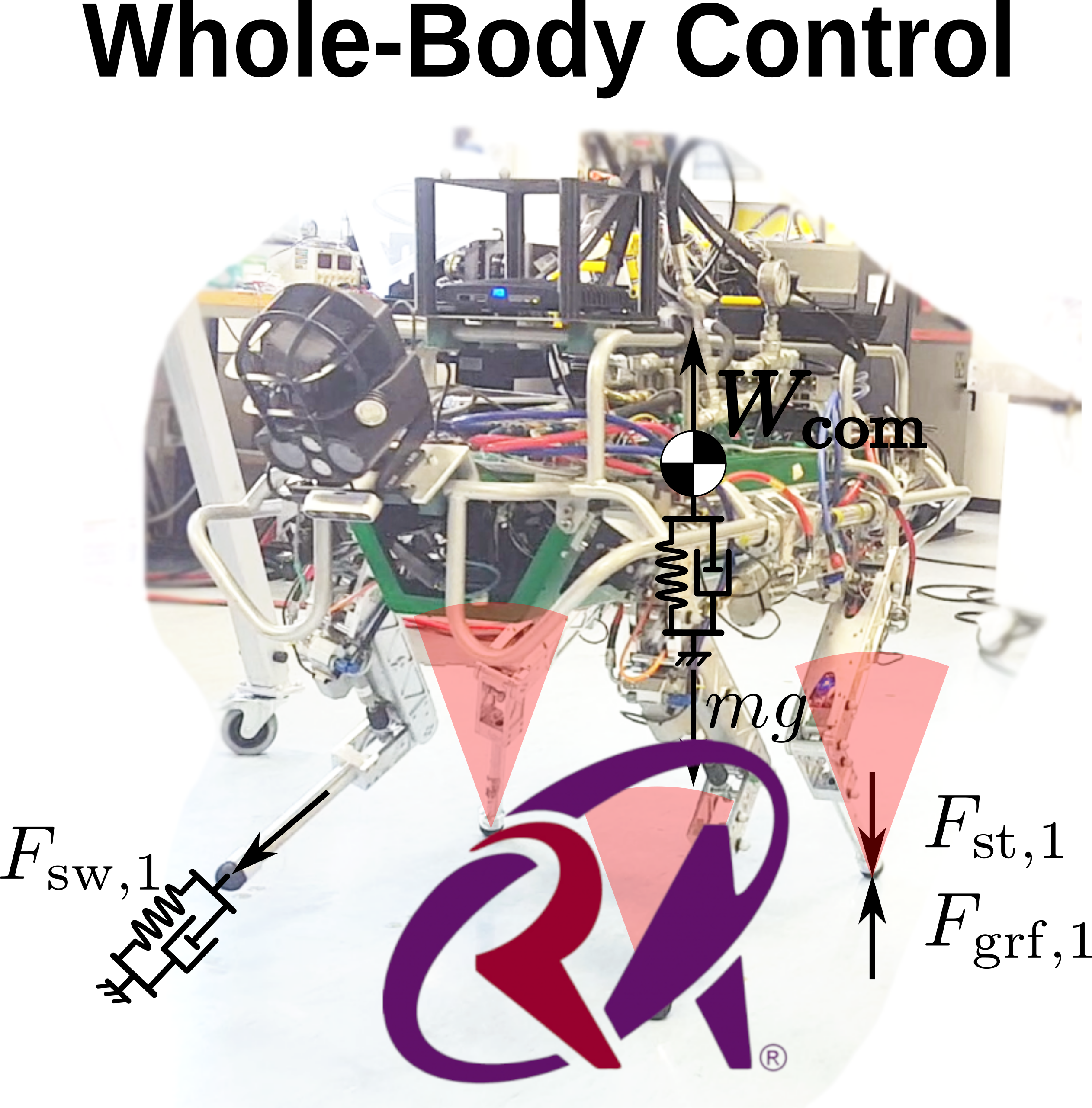 Passive Whole-Body Control for Quadruped Robots: Experimental Validation Over Challenging TerrainIEEE Robotics and Automation Letters (RA-L), Jul 2019
Passive Whole-Body Control for Quadruped Robots: Experimental Validation Over Challenging TerrainIEEE Robotics and Automation Letters (RA-L), Jul 2019






